")
INHOUDSOPGAWE:
- Outeur John Day day@howwhatproduce.com.
- Public 2024-01-30 07:27.
- Laas verander 2025-01-23 12:53.

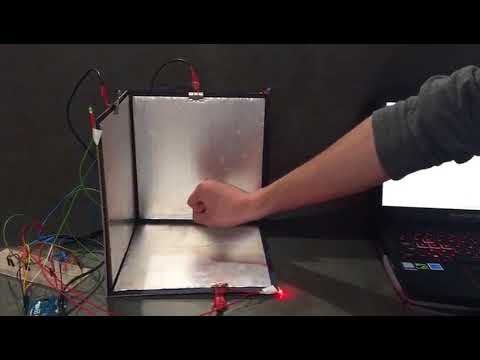

In hierdie instruksie word verduidelik hoe die beweging van 'n hand in 'n 3D -ruimte gevolg kan word deur die beginsel van kapasitiewe waarneming te gebruik. Deur die afstand tussen 'n gelaaide aluminiumfoelie en u hand te verander, sal die kapasiteit van die kapasitor wissel. Hierdie metode kan gebruik word as 'n lae-end alternatief vir traagheids- en optiese stelsels om beweging in 3D-ruimte op te spoor. In hierdie prototipe het ons LED's bygevoeg wat sal gloei as die voorwerp te naby aan die aluminiumfoelie kom.
Stap 1: Vereiste gereedskap en materiaal
- 3x 270k Ohm weerstand
- 3x 10k Ohm weerstand
- 3x Alligator clip
- 1x rooi LED
- 1x blou LED
- 1x groen LED
- 3x 220 Ohm weerstand
- Soldeer
- Krimp hitte
- Skermkabel
- Arduino Uno
- Tinfoelie
- Karton
- Band
- Spuit gom
- Broodbord
- Aansluitdrade (verskillende lengtes)
Stap 2: Bou die raam




Knip drie vierkantige stukke karton (250x250 mm) en drie vierkantige stukke aluminiumfoelie (230x230 mm) uit. Dien spuitgom aan die een kant van die aluminiumfoelie toe en pas elkeen op die stukke karton toe. In hierdie prototipe werk die velle aluminiumfoelie as ons kapasitiewe sensors. Maak dus seker dat daar genoeg spasie is tussen die aluminiumfoelie en die rand van die karton, sodat daar geen kontak tussen die verskillende velle velle is sodra die raam gemonteer is nie. Sodra die foelie op die karton aangebring is, is dit tyd om die drie kartonstukke met band te monteer om die raam te voltooi. Maak weer seker dat daar geen kontak tussen die verskillende velle aluminiumfoelie is nie.
Stap 3: Bedrading van skilddrade na die plaat en Arduino



Dit is belangrik om 'n beskermde kabel te gebruik om die foelies aan die stroombaan te koppel. Die gebruik van normale kabels sal 'n antenna -effek genereer en u sensorlesings belemmer. Maak seker dat u 3 afgedekte kabels het wat ongeveer 50 cm lank is. Neem een kabel, trek die draad af, sny die afskermdrade af en gebruik slegs die binneste draad om dit aan te sluit deur die draad aan die krokodilklem vas te soldeer. Maak seker dat u 'n hitte krimp om die soldeerverbinding te bedek. Knip die krokodilleklemme aan die aluminiumfoelie vas.
Koppel al die skilddrade aan die positiewe ry van u broodbord. Koppel dan hierdie positiewe ry aan die 5V -verbinding op u Arduino. Neem nou die hoofdraad van die skildkabel en verbind 'n 10k Ohm en 220k Ohm weerstand parallel. Koppel dit aan die uitvoerpoort van u Arduino (ons het 8, 9 en 10 gebruik).
Herhaal hierdie stap nog 2 keer vir die ander vliegtuie van die prototipe.
Stap 4: Bedrading van die LED's




Soldeer die punte van LED's aan lang draad sodat dit vanaf die arduino -bord die hoeke van die onderskeie plate kan bereik.
Ons het penne 2, 3 en 4 gebruik as die uitsetpenne vir ons LED's. Hierdie uitset is gekoppel aan die broodbord en gekoppel aan die positiewe been van die LED. Die negatiewe been van die LED word dan aan die 330 Ohm -weerstand gekoppel. Die ander kant van die weerstand is gekoppel aan die grond van die broodbord, wat aan die grond van die Arduino gekoppel is. Herhaal dit vir al 3 LED's. In ons prototipe is die blou LED gekoppel aan die Y-vlak, die rooi LED aan die Z-vlak en die groen LED aan die X-vlak. Plak die LED's op die ooreenstemmende vliegtuie vas om direkte terugvoer te kry wanneer u die prototipe gebruik.
As u nie 'n broodbord gebruik nie en u die skildkabel direk met die Arduino wil verbind, kan u die aangehegte prentjie sien vir 'n goeie oorsig van die soldeeraansluitings. U finale verbindings moet soos die oorsigbeeld lyk.
Stap 5: Kodering
In die aanhangsel het ons die kode wat ons vir hierdie eksperiment gebruik het, geplaas. Vir ekstra insigte word 'n opmerking geplaas na elke hoofopdrag wat verduidelik wat in die kode gebeur. Open die kode in u Arduino -sagteware op u rekenaar en laai dit op na u Arduino. As u 'n skootrekenaar gebruik, moet u seker maak dat dit gehef word; anders werk u prototipe nie.
Stap 6: Gebruik die prototipe
Hierdie manier van 3D -bewegingsopsporing is baie sensitief vir omliggende veranderlikes. Maak dus seker dat u die waardes in die kode volgens u eie situasie kalibreer. U kan die seriële monitor eenvoudig gebruik om die regte waardes te kry. Wenk: u kan self 'n kalibrasie inbou, waar dit die gemiddelde waardes + 10 % neem as u die kode uitvoer. In die video word gedemonstreer hoe die prototipe korrek moet werk.
Aanbeveel:
Kapasitiewe stylus vir 'n weggooibare pen: 6 stappe (met foto's)
")
Kapasitiewe stylus vir 'n weggooibare pen: ek het 'n dosyn Uni-ball Micro Roller Ball Penne. Ek wil 'n kapasitiewe stylus by die pet op een van hulle voeg. Dan kan die dop en stylus van die een pen na die volgende na die volgende verskuif word, aangesien elke inket opraak. Ek is Jason Poel Smith dankbaar vir sy
Toets Bare Arduino, met speletjiesagteware met behulp van kapasitiewe invoer en LED: 4 stappe

Toets Bare Arduino, met speletjiesagteware met behulp van kapasitiewe invoer en LED: " Push-It " Interaktiewe spel met 'n kaal Arduino -bord, geen eksterne onderdele of bedrading nodig nie (gebruik 'n kapasitiewe 'aanraak' invoer). Hierbo getoon hoe dit op twee verskillende borde werk. Push-It het twee doeleindes. Om vinnig te demonstreer/v
ESP32 Kapasitiewe raakinvoer met behulp van "Metaalgatproppe" vir knoppies: 5 stappe (met foto's)
")
ESP32 Kapasitiewe raakinvoer met behulp van 'Metallic Hole Plugs' vir knoppies: Terwyl ek besig was met die ontwerpbesluite vir 'n komende ESP32 WiFi Kit 32 -projek wat drie knoppie -invoer benodig, was 'n opvallende probleem dat die WiFi Kit 32 nie 'n enkele meganiese drukknop het nie, tog alleen drie meganiese knoppies, f
ROOMBA Aangedryf deur ARDUINO YUN Via Wifi App deur STEFANO DALL'OLIO: 4 stappe (met foto's)
")
ROOMBA Aangedryf deur ARDUINO YUN Via Wifi App deur STEFANO DALL'OLIO: Met hierdie gids deel ek die kode om ARDUINO YUN aan Roomba te koppel om Roomba via Wifi te bestuur. Die kode en die app is volledig deur myself gemaak en ontwikkel Stefano Dall ' Olio.My Roomba is Roomba 620, maar jy kan dieselfde kode vir ander Roomb gebruik
Kapasitiewe aanraking met Evive (Arduino -gebaseerde beheerder): 6 stappe (met foto's)
: 6 stappe (met foto's)")
Kapasitiewe aanraking met Evive (Arduino -gebaseerde beheerder): Weet u hoe die aanraakskerm van u slimfoon werk? Die slimfoon het 'n verskeidenheid aanraaksensors onder die glasskerm. Deesdae is dit maklik gebaseer op kapasitansie -aanraakwaarnemingstegnologie en selfs 'n sagte aanraking. Kapasitiewe aanraking word waargeneem