")
INHOUDSOPGAWE:
- Stap 1: Voorsieningslys
- Stap 2: Oorsig en skematiese
- Stap 3: Die borsellose motor met Arduino beheer
- Stap 4: Die konstruksie van die laserplaat -onderstel
- Stap 5: Laser- en servomotormontering
- Stap 6: Installeer die glyring
- Stap 7: Soldeer die elektronika
- Stap 8: Konstruksie van die elektroniese boks
- Stap 9: Installeer elektronika in die boks
- Stap 10: Montering en bedrading van die ultrasoniese sensors
- Stap 11: Programmering van die Dynamic Laser Vortex
- Outeur John Day day@howwhatproduce.com.
- Public 2024-01-30 07:24.
- Laas verander 2025-01-23 12:53.

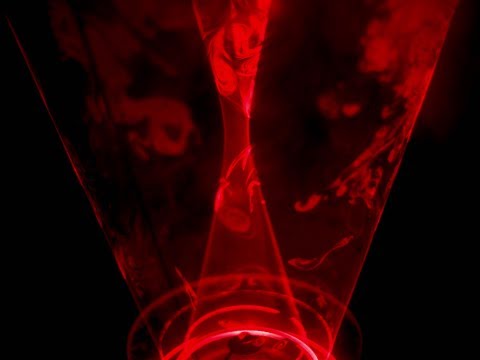


Lasers kan gebruik word om ongelooflike visuele effekte te skep. In hierdie projek het ek 'n nuwe tipe laservertoning gebou wat interaktief is en musiek speel. Die toestel draai twee lasers om twee draaikolkagtige velle lig te vorm. Ek het afstandsensors in die toestel ingesluit sodat die laserblaaie gemanipuleer kan word deur u hand na hulle te beweeg. Terwyl die persoon met die sensors in wisselwerking tree, speel die toestel ook musiek deur middel van 'n MIDI -uitset. Dit bevat idees van laserharpe, laserwervels en POV -skerms.
Die instrument word beheer met 'n Arduino Mega wat die insette van ultrasoniese sensors inneem en die tipe laservel wat gevorm word en musiek genereer, uitvoer. As gevolg van die vele vryheidsgraderings van die lasers, is daar baie verskillende laserplaatpatrone wat geskep kan word.
Ek het vooraf 'n dinkskrum oor die projek gedoen met 'n nuwe kuns-/tegnologiegroep in St. Louis met die naam Dodo Flock. Emre Sarbek het ook 'n paar aanvanklike toetse uitgevoer op die sensors wat gebruik word om beweging naby die toestel op te spoor.
As u 'n laserplaatapparaat bou, moet u onthou dat u veilig lasers en draaiskywe kan gebruik.
Update van 2020: Ek het besef dat die oppervlak wat met die lasers geskep is, 'n hiperboloïed is.
Stap 1: Voorsieningslys



Materiaal
Lasers -
Borsellose motor -
Elektroniese snelheidsbeheerder -
Servomotors -
Transistors
Laaghout
Plexiglas
Ultrasoniese sensors
Slipring -
Wit LED's -
Bok -omsetters
Draaddraad
MIDI -aansluiting
Potensiometer en knoppe -
Hardeware - https://www.amazon.com/gp/product/B01J7IUBG8/ref=o…https://www.amazon.com/gp/product/B06WLMQZ5N/ref=o…https://www.amazon. com/gp/product/B06XQMBDMX/ref = o …
Weerstande
JST -aansluitkabels -
Wisselstroomskakelaar
12V kragtoevoer -
Houtgom
wondergom
Houtskroewe
USB -verlengkabel -
Gereedskap:
Soldeerbout
Draadknipper
Jig sien
Sirkelsaag
Mikrometer
Kragboor
Stap 2: Oorsig en skematiese

'N Laserstraal skep 'n goed gekollimeerde (dws smal) ligstraal, so 'n manier om 'n vel lig te produseer, is om die straal vinnig in 'n patroon te beweeg. Om byvoorbeeld 'n silindriese ligvel te skep, draai jy 'n laser om 'n as parallel met die rigting wat dit wys. Om 'n laser vinnig te beweeg, kan u 'n laser aan 'n houtplank wat aan 'n borsellose DC -motor geheg is, aanheg. Met dit alleen kan u koel silindriese laserwervels skep!
Ander laserwervelprojekte bereik dit deur 'n gekantelde spieël op die rotasie -as te monteer met 'n stilstaande laser wat na die spieël gerig is. Dit skep 'n laserplaatkegel. Met hierdie ontwerp blyk dit egter dat alle laserblaaie uit 'n enkele oorsprong kom. As die lasers uit die as geplaas is, net soos met die ontwerp wat ek gebou het, kan u konvergerende laserblaaie skep, soos die uurglasvorm wat in die video getoon word.
Maar wat as u wil hê dat die ligplate dinamies en interaktief moet wees? Om dit te bereik, het ek twee lasers op servo's vasgemaak en dan die servo's op die houtplank vasgemaak. Nou kan die servo's die hoek van die laser aanpas ten opsigte van die motor se rotasie -as. Deur twee lasers op twee verskillende servo's te hê, kan u twee verskillende ligblaaie met die toestel skep.
Om die spoed van die GS -motor te beheer, het ek 'n potensiometer gekoppel aan 'n Arduino wat die inset van die potenometer neem en 'n sein na die elektriese snelheidsbeheerder (ESC) stuur. Die ESC beheer dan die snelheid van die motor ('n redelike gepaste naam, ja), afhangende van die weerstand van die potensiometer.
Die laser se aan/uit -toestand word beheer deur dit aan die emitter van 'n transistor te koppel wat in versadiging werk (dws werk as 'n elektriese skakelaar). 'N Beheersignaal word na die basis van die transistor gestuur wat die stroom deur die laser beheer. Hier is 'n bron vir die beheer van 'n vrag met 'n transistor met 'n arduino:
Die servosposisie word ook met die Arduino beheer. As die plank draai, kan die ligblad gemanipuleer word deur die servoposisie te verander. Sonder gebruikersinvoer kan dit alleen dinamiese ligblaaie skep wat betowerend is. Daar is ook ultrasoniese sensors rondom die rand van die toestel, wat gebruik word om te bepaal of iemand haar hand naby die ligblaaie steek. Hierdie invoer word dan gebruik om die lasers te skuif om nuwe ligblaaie te skep OF 'n MIDI -sein te genereer. 'N MIDI -aansluiting is gekoppel om die MIDI -sein na 'n MIDI -speeltoestel oor te dra.
Stap 3: Die borsellose motor met Arduino beheer



Om 'n draaikolkagtige ligblaaie te skep, moet u die laserstraal draai. Om dit te bereik, het ek besluit om 'n borsellose GS -motor te probeer gebruik. Ek het geleer dat hierdie tipe motors baie gewild is by modelvliegtuie en hommeltuie, en ek het gedink dit is redelik maklik om te gebruik. Ek het langs die pad 'n paar stukkies raakgeloop, maar oor die algemeen is ek tevrede met hoe die motor vir die projek werk.
Eerstens moet die motor gemonteer word. Ek het 'n onderdeel op maat gemaak om die motor vas te hou en aan 'n bord vas te hou wat die toestel bevat. Nadat die motor veilig was, het ek die motor aan die ESC gekoppel. Volgens wat ek gelees het, klink dit baie moeilik om 'n kwaslose motor sonder een te gebruik. Om die motor te laat draai, het ek 'n Arduino Mega gebruik. Aanvanklik kon ek nie die motor laat draai nie, want ek het net die beheersignaal met 5V of grond verbind, sonder om 'n basiese waarde behoorlik in te stel of die ESC te kalibreer. Ek volg toe 'n Arduino -tutoriaal met 'n potensiometer en servomotor, en dit laat die motor draai! Hier is 'n skakel na die tutoriaal:
Die ESC -drade kan eintlik op enige manier aan die borsellose motor gekoppel word. U benodig 'n paar vroulike piesangproppe. Die dikker rooi en swart kabels op die ESC is gekoppel aan 'n GS -kragtoevoer teen 12V, en die swart en wit kabels op die ESC -beheeraansluiting is onderskeidelik op die grond en 'n bedieningspen op die Arduino gekoppel. Kyk na hierdie video om te leer hoe om die ESC te kalibreer:
Stap 4: Die konstruksie van die laserplaat -onderstel



Nadat die motor aan die draai is, is dit tyd om die onderstel van die ligte vel op te bou. Ek het 'n stuk laaghout gesny met 'n CNC -masjien, maar u kan ook 'n malsaag gebruik. Die laaghout hou die ultrasoniese sensors en het 'n gat daarin om 'n stuk pleksiglas te pas. Die pleksiglas moet met epoksy aan die hout geheg word. Daar word gate geboor om die glipring deur te pas.
'N Ander sirkelvormige laaghout word dan gesny om die borsellose motor vas te hou. In hierdie houtplaat word gate geboor sodat drade later in die konstruksie kan deurloop. Nadat die motorhouer vasgemaak is en gate geboor is, word die twee velle laaghout vasgemaak met 1x3 planke wat ongeveer 15 cm lank en metaalhakies gesny is. Op die foto kan u sien hoe die pleksiglas bo die motor en die lasers is.
Stap 5: Laser- en servomotormontering



Die veranderlike ligblaaie word geskep deur lasers te beweeg ten opsigte van die rotasie -as. Ek het 'n houer ontwerp en 3D gedruk wat 'n laser aan 'n servo heg en 'n houer wat die servo met die draaiplank verbind. Heg eers die servo aan die servo -houer vas met twee M2 -skroewe. Skuif dan 'n M2 -moer in die laserhouer en draai 'n stelskroef vas om die laser op sy plek te hou. Voordat u die laser aan die servo koppel, moet u seker maak dat die servo in die gesentreerde werkposisie gedraai word. Gebruik die servo -tutoriaal en stuur die servo op 90 grade. Monteer dan die laser soos aangedui op die foto met 'n skroef. Ek moes ook 'n bietjie gom byvoeg om te verseker dat die laser nie per ongeluk skuif nie.
Ek het 'n lasersnyer gebruik om die plank met 'n afmeting van ongeveer 3 cm x 20 cm te maak. Die maksimum grootte van die ligplaat hang af van die grootte van die houtplank. 'N Gat is in die middel van die plank geboor sodat dit op die borsellose motoras pas.
Daarna plak ek die laserservosamestelling op die plank vas sodat die lasers in die middel was. Maak seker dat alle komponente op die plank gebalanseer is ten opsigte van die rotasie -as van die plank. Soldeer JST verbind die lasers en servokabels sodat hulle in die volgende stap met die glyring verbind kan word.
Bevestig laastens die plank met laserservosamestellings aan die borstellose motor met 'n wasser en moer. Toets die borsellose motor op hierdie punt om seker te maak dat die plank kan draai. Wees versigtig om nie die motor te vinnig te ry of u hand in die rigting van die plank te steek nie.
Stap 6: Installeer die glyring


Hoe voorkom u dat die drade verstrengel raak as die elektronika draai? Een manier is om 'n battery vir 'n kragtoevoer te gebruik en dit aan te sluit op die roterende eenheid, soos in hierdie POV -instruksie. 'N Ander manier is om 'n glyring te gebruik! As u nog nie van 'n slinger gehoor het nie, of 'n ander een gebruik het, kyk dan na hierdie wonderlike video wat demonstreer hoe dit werk.
Maak eers die ander ente van die JST -verbindings aan die glyring vas. U wil nie hê dat die drade te lank moet wees nie, want daar is 'n moontlikheid dat hulle op iets vasval as die plank draai. Ek het die glyring aan die plexiglas bo die borsellose motor vasgemaak en gate in die skroewe geboor. Wees versigtig om nie die pleksiglas te kraak tydens die boor nie. U kan ook 'n lasersnyer gebruik om meer akkurate gate te kry. Koppel die verbindings sodra die glyring aangebring is.
Op hierdie punt kan u die glipdrade aan penne van 'n Arduino koppel om 'n paar voorlopige toetse met die laserplaatgenerator te doen.
Stap 7: Soldeer die elektronika




Ek het 'n prototipe -bord gesny om al die elektronika aan te sluit. Omdat ek 'n 12V-kragtoevoer gebruik het, moet ek twee DC-DC-omsetters gebruik: 5V vir die lasers, servo's, potensiometer en MIDI-aansluiting en 9V vir die Arduino. Alles is verbind soos aangedui op die diagram deur te soldeer of om te draai. Die bord is daarna met 'n 3D -gedrukte deel verbind met behulp van PCD -afstande.
Stap 8: Konstruksie van die elektroniese boks




Al die elektronika word in 'n houtkas gehuisves. Ek sny 1x3 hout vir die kante van die boks en sny 'n groot opening aan die een kant sodat die drade op 'n bedieningspaneel kan deurloop. Die sye is met klein blokkies hout, houtlym en skroewe verbind. Nadat die gom droog was, het ek die kante van die boks afgeskuur om al die onvolmaakthede in die boks gelyk te maak. Toe sny ek dun hout aan die voorkant, agterkant en onderkant van die boks. Die onderkant is aan die kante vasgespyker, en die voor- en agterkant is op die boks vasgeplak. Uiteindelik het ek die afmetings van die komponente op die voorpaneel van die boks gemeet en gate gemaak: die kragkabelaansluiting, usb -aansluiting, MIDI -aansluiting en potensiometer.
Stap 9: Installeer elektronika in die boks



Ek het die kragtoevoer met skroewe aan die boks geheg, die Arduino met 'n pasgemaakte houer en die printplaat wat in stap 7 geskep is. Die potensiometer en die MIDI -aansluiting is eers met 'n draaddraad aan die bord gekoppel en dan aan die voorste paneel. Die wisselstroomaansluiting is gekoppel aan die kragtoevoer, en die GS -uitset van die kragtoevoer is gekoppel aan die insette van die Buck -omsetters en kabels wat met die borsellose motor verbind word. Die motor-, servo- en laserdrade word dan deur 'n gat in die laaghout tot by die elektroniese boks geloop. Voordat ek met die ultrasoniese sensors werk, het ek die komponente afsonderlik getoets om seker te maak dat alles korrek bedraad is.
Ek het aanvanklik 'n wisselstroomaansluiting gekoop, maar ek het 'n paar slegte resensies daarvan gelees dat dit gesmelt het, sodat ek gate op die voorkant van die verkeerde grootte gehad het. Daarom het ek 'n paar domkragadapters ontwerp en 3D gedruk om te pas by die grootte van die gate wat ek gesny het.
Stap 10: Montering en bedrading van die ultrasoniese sensors



Op hierdie stadium is die lasers, servo's, borsellose motor en MIDI -aansluiting almal gekoppel aan en kan beheer word deur die Arduino. Die laaste hardeware stap is die koppeling van die ultrasoniese sensors. Ek het 'n ultrasoniese sensor ontwerp en 3D gedruk. Ek het toe die ultrasoniese sensorsamestellings bedraad en eweredig aan die boonste laaghoutblad van die ligplaatgenerator vasgemaak. Die draaddraad is na die elektronika -boks gevoer deur gate in die laaghoutblad te boor. Ek het die draadomhulsel met die toepaslike penne op die Arduino verbind.
Ek was 'n bietjie teleurgesteld oor die prestasie van die ultrasoniese sensor. Hulle het redelik goed gewerk vir afstande tussen 1 cm - 30 cm, maar die afstandmeting is baie raserig buite die bereik. Om die sein -geraas -verhouding te verbeter, het ek probeer om die mediaan of gemiddelde van verskeie metings te neem. Die sein was egter steeds nie betroubaar genoeg nie, so ek het uiteindelik die afsnypunt vir die speel van 'n noot of die verandering van die laservel op 25cm gestel.
Stap 11: Programmering van die Dynamic Laser Vortex

Nadat al die bedrading en montering voltooi is, is dit tyd om die toestel vir die ligblad te programmeer! Daar is baie moontlikhede, maar die algemene idee is om die insette van die ultrasoniese sensors in te neem en seine vir MIDI uit te stuur en die lasers en servo's te beheer. In alle programme word die rotasie van die plank beheer deur aan die knop van die potensiometer te draai.
U benodig twee biblioteke: NewPing en MIDI
Die volledige Arduino -kode is hierby aangeheg.


Tweede prys in die uitvindinguitdaging 2017
Aanbeveel:
BBC Micro: bit and Scratch - Interaktiewe stuurwiel en dryfspel: 5 stappe (met foto's)
")
BBC Micro: bit and Scratch - Interactive Steering Wheel & Driving Game: Een van my klasopdragte hierdie week is om die BBC Micro: bit te gebruik om in verbinding te tree met 'n Scratch -program wat ons geskryf het. Ek het gedink dat dit die perfekte geleentheid was om my ThreadBoard te gebruik om 'n ingebedde stelsel te skep! My inspirasie vir die krap
Arduino interaktiewe LED koffietafel: 6 stappe (met foto's)
")
Arduino interaktiewe LED koffietafel: ek het 'n interaktiewe koffietafel gemaak wat ledligte onder 'n voorwerp aanskakel as die voorwerp oor die tafel geplaas word. Slegs die LED's wat onder die voorwerp is, sal brand. Dit word gedoen deur effektief nabyheidssensors te gebruik, en wanneer die nabyheid
Interaktiewe LED -koepel met Fadecandy, verwerking en Kinect: 24 stappe (met foto's)
")
Interaktiewe LED -koepel met Fadecandy, verwerking en Kinect: WhatWhen in Dome is 'n geodesiese koepel van 4,2 m bedek met 4378 LED's. Die LED's is almal individueel gekarteer en aangespreek. Hulle word beheer deur Fadecandy en Processing op 'n Windows -tafelblad. 'N Kinect is aan een van die stutte van die koepel vasgemaak, so mo
Interaktiewe Led -lamp - Tensegrity -struktuur + Arduino: 5 stappe (met foto's)
")
Interaktiewe Led -lamp | Tensegrity Structure + Arduino: Hierdie stuk is 'n bewegingsgerigte lamp. Die lamp is ontwerp as 'n minimale trekspanning, en verander sy kleurkonfigurasie in reaksie op die oriëntasie en bewegings van die hele struktuur. Met ander woorde, afhangende van die oriëntasie
Arduino interaktiewe bordspel: 5 stappe (met foto's)
")
Arduino Interaktiewe Bordspel: Interaktiewe Bordspel - HAC-KINGIntro: Voor het vak If This Then That van die opleiding Games & Interaksie met HKU vereis dat ons 'n interaksie -konsep kan ontwerp en ontwerp. Hierdie konsep kan met hardeware en sagteware gemaak word