![[vPython] Spider Robot Simulator: 4 stappe](https://i.howwhatproduce.com/images/003/image-8663-22-j.webp "[vPython] Spider Robot Simulator: 4 stappe")
INHOUDSOPGAWE:
- Outeur John Day day@howwhatproduce.com.
- Public 2024-01-30 07:27.
- Laas verander 2025-01-23 12:53.


As u my ontwerp interessant vind, kan u 'n klein skenking maak:
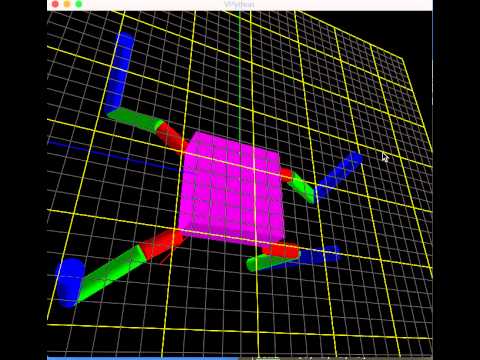
Ek gebruik vPython om die aksies vir my Spider -robot te simuleer. Dit is maklik om u eie belangstellings in pc/mac te ontwikkel, en dan na arduino te stuur.
U kan die regte robot leer as u daarin belangstel
www.instructables.com/id/DIY-Spider-RobotQu…
VPython is die programmeertaal van Python plus 'n 3D -grafiese module genaamd 'visueel' wat deur David Scherer in 2000 ontstaan het. VPython maak dit maklik om 3D -skerms en animasies te navigeer, selfs vir diegene met beperkte programmeringservaring. Omdat dit op Python gebaseer is, het dit ook baie te bied vir ervare programmeerders en navorsers.
Stap 1: Installeer VPython en Editor


installeer python , Ek stel voor om 2.7.x te gebruik
www.python.org/
en dan vpython
vpython.org/
en my gunsteling redakteur - PyCharm
www.jetbrains.com/pycharm/
Stap 2: Laai die kode af en voer dit uit

Laai die kode af en maak dit oop met PyCharm, voer die kode uit, en u sien 'n pragtige 3D -spinrobot op die skerm, en u kan die muis met die middelste knoppie gebruik om in/uit te zoom, met die regterknoppie om te draai.
Stap 3: Ontwikkel u aksies in hierdie simulator
Dit sal lekker wees as u meer interessante aksies kan ontwikkel en vir my kan deel.
Stap 4: Afstandsbediening na die Real Spider Robot
Hoe gaan dit met die beheer van die regte robot deur python gedink bluetooth? Miskien wil u alreeds die pad probeer. Ek sal dit later plaas as iemand dit nodig het.
Aanbeveel:
"Miles" die Quadruped Spider Robot: 5 stappe

"Miles" die Quadruped Spider Robot: Gebaseer op Arduino Nano, Miles is 'n spinrobot wat sy 4 bene gebruik om te loop en te maneuver. Dit gebruik 8 SG90 / MG90 Servomotors as aandrywers vir die bene, bestaan uit 'n pasgemaakte PCB wat gemaak is om die servo's aan te dryf en te beheer en die Arduino Nano.PCB het
Quadruped Spider Robot - GC_MK1: 8 stappe (met foto's)
")
Quadruped Spider Robot - GC_MK1: Die spinrobot, ook bekend as GC_MK1, beweeg vorentoe en agtertoe en kan ook dans, afhangende van die kode wat op die Arduino gelaai is. Die robot gebruik 12 mikro -servomotors (SG90); 3 vir elke been. Die kontroleerder wat gebruik word om die servomotors te beheer, is 'n Arduino Nan
Hoe om FlySky -sender aan te sluit op enige rekenaar -simulator (ClearView RC -simulator) -- Sonder 'n kabel: 6 stappe
 -- Sonder 'n kabel: 6 stappe")
Hoe om FlySky -sender aan te sluit op enige rekenaar -simulator (ClearView RC -simulator) || Sonder 'n kabel: Gids om FlySky I6 aan te sluit met 'n rekenaar om vlug vir beginners van vlerkvliegtuie te simuleer. Vlugsimulasieverbinding met Flysky I6 en Arduino benodig nie simulasiekabels
[DIY] Spider Robot (Quad Robot, Quadruped): 14 stappe (met foto's)
![[DIY] Spider Robot (Quad Robot, Quadruped): 14 stappe (met foto's)](https://i.howwhatproduce.com/images/001/image-1641-34-j.webp "[DIY] Spider Robot (Quad Robot, Quadruped): 14 stappe (met foto's)")
[DIY] Spider Robot (Quad Robot, Quadruped): as u ekstra ondersteuning van my nodig het, is dit beter om 'n geskikte donasie aan my te lewer: http: //paypal.me/RegisHsu2019-10-10 opdatering: Die nuwe samesteller sal die probleem met die berekening van die drywende getal veroorsaak. Ek het die kode al verander. 2017-03-26
[DIY] Spider Robot - DEEL II - Afstandsbediening: 5 stappe
![[DIY] Spider Robot - DEEL II - Afstandsbediening: 5 stappe](https://i.howwhatproduce.com/images/003/image-8661-16-j.webp "[DIY] Spider Robot - DEEL II - Afstandsbediening: 5 stappe")
[DIY] Spider Robot - DEEL II - Afstandsbediening: as u my ontwerp interessant vind, kan u 'n klein skenking maak: http: //paypal.me/RegisHsu Hier is die deel 1-https://www.instructables.com/id/DIY-Spider-Ro